I use the following headers and sockets for the ESP32, I buy them by the strip.




To add the components to the PCB, my recommendation is to start with all the passive components like resistors, capacitors and then the active transistors, MOSFET’s (not the main NFET’s
M1, M2), diodes and the voltage regulators U9 and U12. Do not install the
relay and the snubber circuit yet. What I then would do is to connect a Lab
Power Supply with a setting of 12V and 50mA to the DC input of the board. If it
powers-up without getting into current limitation, you will probably not have
any shorted rails to ground, and can proceed to test the +12, +9 and +5 supply
voltages. If they check-out, you can add the ICL7660 and test the -5V rail.
After that, you can add the REF5040 and check the presence of 4.096V. If
that also checks-out, you can add the trimmers, connector strips, DAC, ADC,
MOSFET switches (U14, U15), all the Opamps and finally, the main relay and
snubber circuit. Basically, everything except placing the ESP32 module in its socket, and
soldering the main NFET’s (M1, M2) and the LM35.
Obtaining the correct ESP32 variation
There are many, many variations of the ESP32 board. I'm using a version that is smaller in width and shorter in length. This is my preferred version of the ESP32, because it fits prototype boards. Most of the others are too wide and you have to connect two prototype boards next to each other to make the ESP board fit.
The version I'm using is also called the ESP32 DEVKIT V1 from DOIT. If you Google this, you will most likely find them. However, there is more to watch out for.
This board only has 30 pins, and the pin rows are about 25mm apart, which is why it will fit in a single prototype board. To make absolutely sure you have the correct version, you also need to look at the available pins on the board. The most important thing to look for are the pins at either end of the board. They must match the picture below.
Even then, there could be two other issues that I describe in a section further below. The board above has the blocking diode installed, visible just to the left in the pic of the voltage regulator.
The other recommended ESP32 board is the VROOM 4MB DEVKIT V1.
However, I have found that
there are slight variations or differences for two components on various
sources for this board. One is the capacitor that should ensure a reset after a download of new firmware. On one of my boards, this capacitor was there, but
not well soldered to the chassis part of the USB-mini. On another one, there
was no diode to block the incoming 5V through the USB, and the VIN supplied
to pin 1 of the board. Having no diode but a 0R resistor means that the VIN
supply will back-feed 5V into the USB port of your PC. Not recommended!
To avoid having to mess with the ESP board and 0402 size parts, we have made provisions on the DL PCB to help fix these two issues.
Verify that the ESP32 module has a 1uF 0402 capacitor most
likely connected to the solder pad of the EN button. It may be soldered at a
45-degree angle, see the left blue arrow. If the capacitor is not installed, you need to install C44 on the PCB. (in the schematic C44 has a red cross through the part, to avoid placing this part when not needed)
UPDATE: To circumvent serial monitors used in the new calibration procedure rebooting the ESP32, you now have to always install C44 with a ceramic 22uF 0805 value!
Also make sure that there is a diode
installed and not a 0 Ohm 0402 resistor (marked 000) as you see here on the board. See the
middle blue arrow below for the location. The picture of the ESP32 further up in the Blog does have a diode, which can be easily identified.
If there is a 0
Ohm resistor on the board, you need to either remove it or do not install R53 but install
D10 on the main PCB. See the schematic below. (in the schematic D10 has a red cross through the part, to avoid placing this part when not needed)
The Back Panel
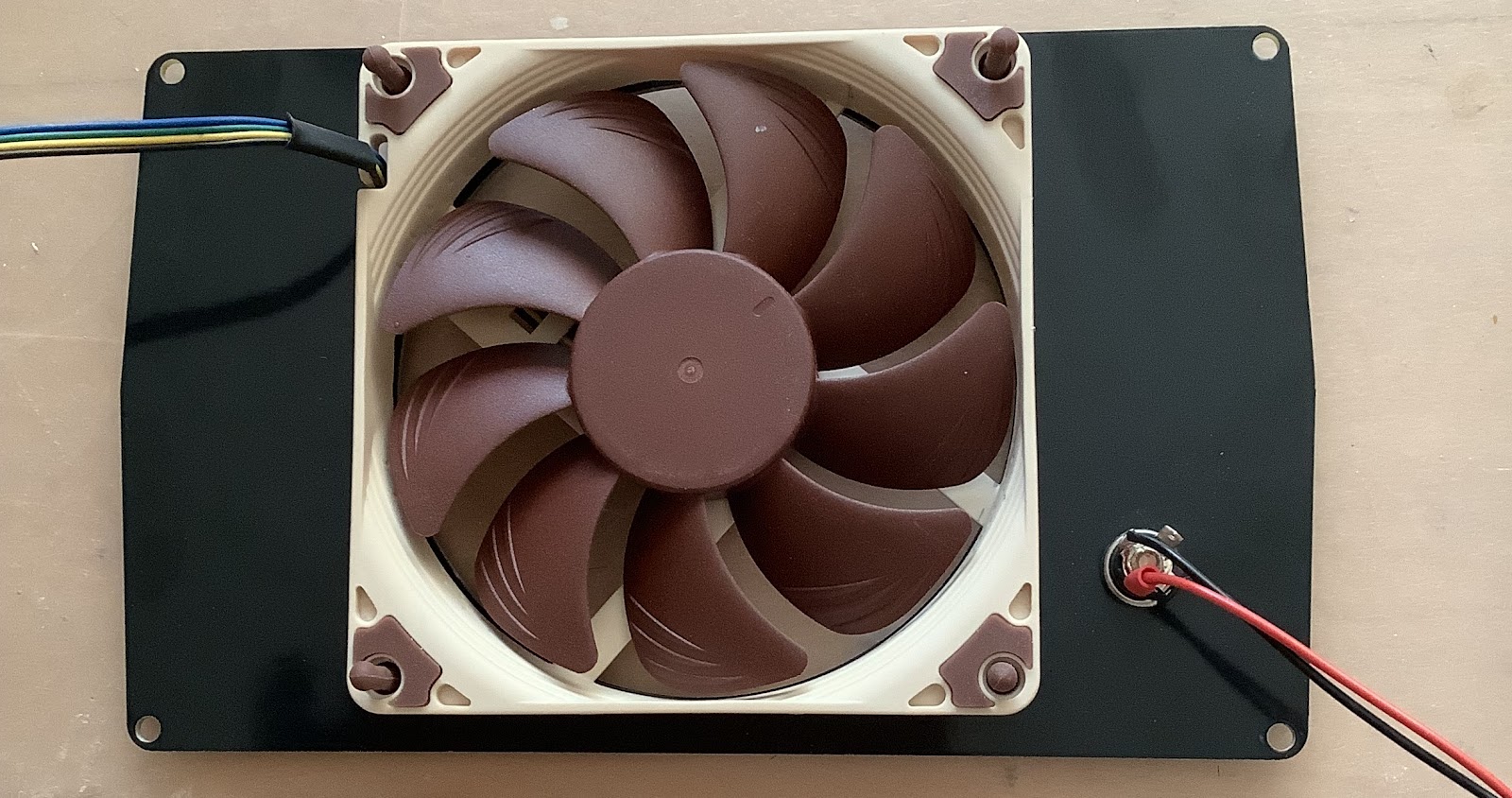
At this moment in the build process, it will help to mount the fan on the
back panel so you can use it to double check the space between that fan and the second heatsink/fan combination that will be mounted on the bottom shell later.
The back panel fan will be mounted using the flexible silicon
mounts that come with the fan.
To help the installation by pulling on these flexible thingies, it is helpful to first counter sink
the 4 holes in the PCB on either side so the silicon will more easily slide into
position when you pull them in.
Note the position of the fan on the back panel, and
where the wires need to come out (top left).
The four wires from the fan come standard with a pretty stiff heat-shrink tube. That's too stiff to my liking, so I cut it off, exposing the four wires.
Modifying the enclosure
The bottom shell of TEKO AUS33.5 enclosure needs to be
modified so we can mount a fan on the bottom to suck fresh air directly into the heatsink
fins inside the enclosure. The fan mounted on the back panel will suck the hot
air away from the heatsink to the outside of the enclosure.
A number of holes need to be drilled in the bottom
shell to get enough airflow to the heatsink. I used Excel to create a raster
for the 6mm holes. The picture shows an earlier position of the fan, I later
moved it further down and added another number of extra holes.
To feed plenty of fresh air from the bottom of the
enclosure to the fan, we need to mount 4 feet that are about 1cm in height to
lift the instrument from the shelf or desk to create the space.
The bottom fan needs to be mounted in the middle of
the enclosure, and the mounting holes 25mm away from the back edge of the bottom shell, to make
room for the fan that is mounted on the back panel. Before you drill the holes,
use the back panel with the fan mounted on it to double check the space you
need. The minimum space between the two fans should be at least 2mm.
The bottom fan and heatsink
The bottom fan will be mounted on the shell by four 30mm
long M3 screws. Because of the plastic, and the two hole positions in the
ventilation area, I recommend you put M3 or M4 rings on the bottom and on the
inside of the plastic shell. Use a normal (flat) M3 nut to tighten the four screws to
the enclosure while making sure that the fan will easily fit. After the fan is
positioned on the four mounting screws, use an isolated M4 ring (teflon?) on top of the fan
before you mount the brackets holding the heatsink.
The heatsink will be mounted about 6mm above the
bottom fan by two strips of a 90 degree angle 15x15mm piece of aluminum. These
strips can be found in your local hardware store and probably come in a length
of 1mtr. Use a metal hacksaw to cut two pieces with a length of 90mm, which is
the same as the size of the fan. Drill two holes of 3mm each 15mm from each end,
that will hold the self-tapping screws mounting the bracket to the heatsink.
I used very short 3mm self-tapping screws to mount the
angle pieces to the heatsink. I also drilled the hole through the second flange of the
heatsink, to make room for the tip of the screw, so it does not bend the thin flanges.

Drill two more holes in the other flank of the L-shape brackets that are 81 mm
apart, so the screws holding the fan to the bottom of the enclosure will go
through these holes. Make sure that these holes are spaced such that when the L-strips are mounted on the heatsink, the holes of the fan will pass through the four 30mm long M3
screws.
Because the heatsink can get very hot, I used four 3mm
insulating rings of the type that are used to mount TO220 type devices isolated to a heat sink. For us they also
serve to electrically isolate the screws from the potential of the heatsink,
that can be up to 100V DC. The two NFET's are not isolated from the heat sink to get maximum heat transfer, that is the reason the heatsink will be at the voltage potential of the DUT voltage.
You’ll need a fifth one to isolate the LM35 from the heatsink later. These rings should fit the holes of the brackets, if not, drill the holes a bit larger to 3.5-4.0mm to create some wriggle room. I then used a Teflon ring on top of the insulators and used self-locking M3 nuts to loosely secure the heatsink, so you don’t need to tighten the nuts too much and put too much pressure on the plastic frame of the fan. You want to minimize the transfer of the mechanical vibration from the fan to the enclosure. It should be a fairly loose fit.
The thermal paste you see in the pictures is because I took my instrument apart to make these instructions and the pictures after I finished my build.
Mounting the Main NFET’s and the LM35
Before you mount the heatsink on top of the fan, you need to create
three M3 tapped holes in the heatsink to mount the two NFET’s and the LM35 temperature
sensor. If you don’t have a good quality and sharp M3 tapping set and the right
size drill (2.5mm), you can also use 3mm self-tapping screws. In that case it is
even more important that you counter-sink these holes well after drilling, so the aluminum
material does not come-up and push the devices up from the heatsink when you fasten the screws. If you use
the M3 taps, lubricate the drill and the taps well and clean the taps and
lubricate them regularly while you are tapping, to make sure that the threads
are not damaged. The NFET’s and the LM35 will need to be tightened to the heatsink well, to get
the maximum heat transfer, so the threats need to be well made.
I created M3 threaded holes for the two NFET’s 23mm
from the back-end of the heatsink, 33.5mm apart, and each about 23mm from the edge of
the heatsink.
The LM35 goes in the middle of the heatsink and 27mm down from the back. Countersink the holes and make sure everything is flat. Use a fine file or very fine sandpaper with a stiff support if needed.
The other four holes you see are from previous mounting positions and are no longer used.
The front of the main PCB will be supported by two extenders
towards the front of the enclosure. I used two 30mm long M3 extenders screwed
together. You can use any length parts, as long as they are 60mm in total. The height can be further adjusted when the PCB is mounted. The position of
the holes in the bottom enclosure for these supports is best determined when the
PCB with the NFET’s and the LM35 is mounted on the heatsink.
As you can see from the picture below, the bottom fan is
positioned such that the wires come out at the left-hand side. The open side of
the fan must be facing the bottom of the enclosure so it sucks the air into the
enclosure.
Because the four wires for the fans have a shrink-wrap tube, they are too stiff to my liking, so I took the tubing off.
The NFET’s and the LM35 will be
mounted flat on the heatsink. The main PCB needs to be mounted as high as possible
away from the heatsink, to minimize heat transfer. With earlier
prototypes, I found that there is a surprising amount of heat transferred
through the NFET leads to the PCB. Keeping the legs long helps.
The challenge is to move the body of the NFET's as far away
from the PCB as possible, to again reduce the heat transfer by way of the
leads, and also the heatsink heating the bottom of the PCB. We also need to create
space away from the PCB to mount the two smaller TO220 heat sinks on top of the NFET's without them
touching the PCB. The place where you bend the leads of the NFET's upwards is
critical to accomplish this. I bend the leads of the NFET's after about
6mm from the case with 90 degrees (not too sharp!) upwards.

You can position the three devices loosely with a
screw using the M3 holes you created earlier, and then position the PCB on top
of them, with the leads protruding through the holes in the PCB. At this
moment, you can use the two mounting extenders to support the other end of the PCB so
it is about horizontal, or use something else to keep the PCB horizontal and stable. I also
used two spacers of 8mm to support the PCB near the NFET’s so you can position
the PCB horizontally in order to solder the leads, and keep them the right amount away from the PCB. Make
sure that the PCB is positioned high enough such that the NFET leads only just protrude 1-2mm
through the PCB holes to allow for proper soldering. The LM35 leads are a bit longer, so that’s OK. I suggest that at first you solder only the middle leads at this moment. Be careful not to drop the
other end of the PCB and bend the NFET leads.
Once you are happy and double checked the position of
the PCB and the three devices, you can mark the position of the two front supports in position on the bottom shelf and then remove the three screws holding the three devices and remove the two extra 8mm standoffs.
You can now finish the mounting of the two
front supports by drilling the holes in the bottom enclosure. I suggest that you use 3.5 or 4mm rings on both sides of the plastic for support. After you have secured the bottom portions of the extender to the enclosure, you can roughly adjust their total height by the second extender.
Before you finally mount everything again, apply heat paste to the NFET positions on the heatsink and use an insulated silicon pad with an insulator ring for the LM35. Loosely tighten the 3 screws again and use an Ohmmeter to make sure that the LM35 tab is insulated from the heatsink, because the NFET’s are not, and their pads will connect to the DUT voltage of up to more than 100V to the heatsink.
When everything is in position, you can tighten the screw for the LM35 and again check that the tab is still isolated. Unscrew the two NFET’s screws again and now add the extra TO220 heatsinks on top of them, using plenty of heat transfer paste.
Make sure that the heatsinks do not touch the PCB. You
can now carefully tighten the screws for the NFET’s.
After that, you can do a final adjustment of the two
front supports so that the PCB is horizontally mounted inside the enclosure. When that is done, re-heat the middle pins of the three devices, to let the stress out, and then solder the other pins. Use plenty of solder for the NFET leads, they will get stressed by the developing heat (up to 100 degrees C).
Preparing for a first power-on
After you have finished the above steps, we can start
to power-up the board again and verify some of the vital signs.
You only need to add the 12V DC power to the
board, but I recommend you use a Lab supply initially with a current setting of 100mA. If there is no large current, indicating a short or another issue, you can now switch to the 12V DC wall wart.
Do not install the ESP32 in its socket at this moment until you have verified the power rails.
Verifying the Power Rails
You can now
verify all the power rail voltages:
·
DC
Input 12...15V at J4
·
+12...15V
at pin 1 U9 (LM7809)
·
+9V
at pin at pin 3 of U9
·
+5V
at pin 3 of U12 (LM7805)
·
-5V
at left side of C31 or pin 5 of U5 (ICL7660)
·
+4.096V
on either side of R60
When that
is OK and within specifications, you can go to the next step, but first disconnect the 12V DC input again.
Adjusting the OLED display in position on the front panel
The OLED module connects to J6 on the PCB. The display module comes with flying leads that each have their own 1-pin connector. I recommend you change these single connectors to a 7-pin connector so you can’t make mistakes with the order, and it’s a lot tidier and easier to remove and install.
Do not apply the main 12V at this moment, it is not needed for this step.
For this step we need to install the ESP32 module on
the PCB and load the ESP32_OLED_Test_V1.ino firmware. This file is located on the Github site in a folder with the same name.
Here: https://github.com/paulvee/Dynamic-DC-Load
Locate the file and download it to your PC. Save it in a new directory called “VB Dynamic DC Load” in a directory on your PC. It will only be used once.
After you saved it, you can use the Arduino IDE, or VSC to locate the file and load it into the IDE.
You can connect your PC to either the mini-USB of the ESP32 module, or start to use the mini-USB to USB-C adapter. When you have made the connection, the red power LED on the ESP32 module should light-up and your PC probably will give a signal that a new device is connected.
After loading the firmware in the Arduino IDE, in Tools select Board and
search for the DOIT ESP32 DEVKIT V1 in the esp32 branch. That’s the ESP module
we use, and the firmware will most likely only work with that module. If you use VSC, look for the platformio.ini file located in the firmware folder.
Under Tools again, select the connected COM port to establish communication to the ESP32.
Compile and download the firmware and see if it gives
you any errors.
If there are, you need to figure out what the problem
is. There are too many possibilities to help you from here.
The OLED display board is probably just lying on your desk and that's OK. Install the connector from the OLED display to J6 on the main PCB, and position the module so you can see the screen and the white connector on the back is on the right-hand side of the display. When done, you can now connect the main 12V
power again, because it is needed to power the OLED. You need to press the EN button on the ESP32 module to force a reboot after you supplied the 12V. When successful, you should first
see a splash screen with the version number for a few seconds and then see a white square on the
OLED screen because all pixels are lit. Congratulations if you got this far!
The text of the splash screen will show the proper orientation of the OLED display. You could change the orientation
of the display in this test code and repeat that later in the firmware, but if
you keep to the instructions, and have the white connector on the right-hand side of the OLED module,
you should be good to go.
The inside edge of the square hole in the front panel will be of a grey color. I used a permanent black felt tip pen to make the edges black. Do this from the back such that an accidental slip of the pen will not be on the front op the panel.
You can now proceed to mount the OLED display in position on the
Front Panel.
Mounting the OLED display on the Front Panel
To prepare for the mounting of the OLED display in
position on the back of the Front Panel, we need to change the mounting
hardware that came with the display.
During all these operations, keep the screen protector
foil on, or apply it again. It will prevent you from scratching or smutching
the glass. Use gloves when appropriate.
Remove the four M2 screws and standoffs. Keep the four screws, but we will not need the standoffs. You need eight extra M2 nuts and four M2
washers to prepare to mount the contraption on the font panel.
Add an M2 nut to the
M2 screws. Stick them through the hole of the board, and add an M2 washer and then
another M2 nut. Tighten loosely. The M2 washer is needed to create some extra
space between the glass of the OLED and the Front Panel, so don’t skip it. You
may otherwise break the OLED display. Do this for all the 4 holes of the OLED
board so it looks like the pictures below. In the next step, the four nuts will be glued to the PCB pads.
You can now position the OLED board to the back of the
Front Panel and check the fit. It should slide on the four nuts, not the glass.
Apply the 12V main power again and do a reset of the
ESP32 (press EN) to verify the orientation of the text from the splash screen
and then see if you can position the white rectangle in the center of the open square of the front panel.
You can now peel the protective cover of the glass, because that may be difficult or even impossible later on. I strongly suggest you use gloves and avoid any finger prints or worse, glue getting on the
glass.
Before you do the next steps, I suggest you
practice the next moves once or twice to make sure you can position the OLED
properly without tangling the wires or moving the OLED display that you just
glued in position. If you are not happy using Superglue, then use normal glue
that you can still move a bit, but you then should tape the two together and
let it dry for a few hours.
I use Super Glue paste, not the liquid, to avoid dripping the goo all over the place.
With the OLED module powered and showing the white square,
hold the OLED board with the display side up in one hand, with the white connector on the back to the
right-hand side and add a drop or two of (Super)glue on each of the 4 nuts that will connect to
the solder pads on the back of the Front Panel.
With your other hand, pick-up the front panel and position and hold it just above the OLED screen
with the silkscreen text from the front panel up and make sure the white LED rectangle square is in the middle of the square hole in the front panel. When
satisfied, slowly lower the front panel and press the two together and let the (Super) glue dry.
After a few seconds with Superglue, you can carefully turn the Front Panel
together with the OLED board face down so the OLED stays in position and you can let it dry a bit more.
If you used
normal glue, you then need to secure the OLED in position with sticky tape so
it will not move while you let it dry for several hours.
Turn off the power and disconnect the USB connection
to the ESP32.
Wait with the next steps until you are sure the OLED
display glue is dry! Give it enough time to dry or you will regret it.
Loading the Dynamic DC Load firmware
The firmware for the Dynamic Load is located on the GitHub
site and needs to be downloaded before you can load it into the ESP32.
The firmware is needed to operate the instrument, and at power-up will make
sure everything starts in a known and safe state.
The firmware is on the Github repo in a folder called firmware/release in a file with the name of the version number. Put all the required files a project directory or the directory you created earlier for the OLED test file.
Use the readme file in that folder that has detailed instructions how to install the firmware binaries, so you do not have to setup VSC and compile the sources.
First firmware turn-on
Do not supply the 12V yet and also do not connect the two fans to the PCB at this moment yet. Position the front panel with the OLED connected to the main board such that you can easily see the display. The front panel does not need to be mounted to the enclosure yet, but you could temporarily do that.
When there are
no download errors, the firmware is loaded and started, and with the
red power LED on the ESP32 module already on, the blue LED hart beat indicator now starts to flash.
If that is the case, then congratulations are in place again. Well done!
With the
USB power applied, and even when you now supply the 12V main power, the ESP32 is not
getting a reset. You need to do a manual reset (press the EN button on the ESP module) again so the firmware
is restarted, the OLED now becomes operational and after the splash screen with the version number, you should see the following start
screen.
Great if you got this far! Don't worry about the "negative" or "invalid" warning in red for the voltage. That is because nothing is connected yet and the inputs are floating. The temperature reading for the heatsink in the lower right corner should be OK though.
Connecting
the fans
Turn off
the 12V and remove the USB connector. If you still use the Lab Supply, raise
the current to 350mA. You can now connect the two fans to the PCB and go to the next step.
Boot
sequence
When you
apply the 12V main power, the red power LED on the ESP32 module will switch on, and both
fans will start to run at full speed. After about 2 seconds, the splash screen appears
and the blue LED on the ESP32 module will start to flash. The LED flashing is an indication for the execution of the firmware main loop, showing the "hart beat". The splash screen
makes place for the initial screen display and the fans will be turned off. That actually completes the boot sequence. The instrument is now ready to make measurements and accept commands.
If you got
this far again, great!
The
front panel
It is now
time to finish the front panel installation, and connect the remaining leads
and parts to make the unit fully functional.
In the
picture below you can see my wiring on the back of the front panel.
To connect
to the rotary encoder, I used a ready-made and assembled wire-harness that I
purchased in different pin sizes. Here I’m using a 5-pin version. On the rotary
encoder itself, I bridged the middle of the 3-pin connector which is GND to one of the two switch pins. The VCC pin of the connector is not used. It is there in case you
have a rotary encoder with a debounce circuit that needs power. The firmware works well enough with the rotary encoder without hardware decoding support.
The main
power leads for the DUT are heavy duty and I used so called car connectors to make it easy
to mount them. Make sure they can handle 10A.
It’s a
little hard to see, but there is a 10nF capacitor directly soldered on the Current
Monitor BNC, to take care of a nasty glitch caused by the induction of the cables.
For the
main DUT and sense inputs, I used these 4mm Banana binding posts. They have the correct
19mm distance and you can use wires to connect to the DUT as well.
The wiring
of the sense switch is quite simple. I connected leads between the main Banana terminals and the sense terminals with solder lugs and used two wires connected to the center pin of the switch to go to J3 on the PCB.
The power switch is in between the plus lead coming from the DC jack on the back panel and the positive connection of J4 on the main board. The ground lead from the DC jack goes directly to J4.
I used
2-pin wire harnesses for the Current Monitor and the Transient Input connectors,
and used these BNC connectors:
The main
power switch and the USB adapter are not showing in the picture.
To make
sure you don’t pull out the USB-micro to USB-C adapter from the ESP32 socket, I
positioned the adapter with everything mounted, and used a tie-wrap flush to
the front panel to secure it. To make sure it stays in position, I then used some
glue to fix the tie-wrap into position.
With the USC-micro to USB-C adapter connected to the ESP32, you may need to adjust the front supports of the main PCB so the adapter easily fits the hole in the front panel.When that is done, you can put the front panel and all the wires to the main PCB in position, and secure the front panel with the two bottom screws to the enclosure. Do not install the top cover just yet.
With everything thus far installed, you should have a fully working instrument that should look like
this:
You are now
ready to move on to the Calibration & Verification section.
Calibration & Verification
Remove the top cover of the enclosure. You need access to the trimmers and test points.
To counter a nasty surprise when we added the Cal Mode, C44 must now always be populated with a 22uF value capacitor. Check that you did so.
The reason is that serial monitors have different ways of asserting the DTR/RTS signals. All boards in the Arduino/ESP family have a two transistor circuit that will use these two signals allow a downloading of the firmware, followed by a reset. Unfortunately, this circuit will also get triggered when a serial monitor opens the COM port, and that will reset the processor through the EN pin by a short duration pulse to ground. To prevent this unwanted reset, C44 must be installed to prevent it. This added value does not interfere with the programming and subsequent reset though.
The other nasty artifact is that when a serial monitor is closed, most will assert the DTR/RTS signals and this will force the EN signal to ground. This will hold the processor in a constant reset mode, and there is nothing that you can do, other then cycle the power. The work-around we created is that after the calibration has ended, you need to pull the USB cable from the DL, -before- you terminate the serial monitor. This is described in detail in the Calibration Guide available in the Github repo, and the updated firmware will give plenty of guidance and warnings.
Performing the calibration
There are two phases in the calibration procedure.
- We will first calibrate the DL hardware by trimmers for the correct voltage and current settings against externally measured sources. After that, the DL will function correctly.
- We will then obtain calibration factors to optionally calibrate the firmware for higher precision of the values shown on the OLED display.
Most software calibrations may not be needed, the DL is already precise, with the exception of the CV tripping point, you should always do that calibration.
Initial step
Make sure you have the latest firmware version (V7.1.6 or higher) installed that is available on the GitHub.
This version will also give you access to the native calibration mode, read on for more information.
Hardware Calibration
Calibrate the OLED voltage measurement display
1. Set a Power Supply to 2.50V, or use a
voltage reference, connect it to the main terminals of the Dynamic Load (DL). Use a DMM to verify the actual voltage.
2. Set the remote sense switch to off.
3. Make sure the NFET’s are OFF so there is
no current flowing.
4. Use the OLED display for Voltage and adjust RV1 on the PCB (Voltage Gain Trim) so the OLED shows
the same voltage or as close as you can get it. (due to the averaging and the resolution, take your time - it may help to reset the averaging by disconnecting the input for a few seconds) At this voltage level, the measurement resolution is 0,75mV, the display cannot show that and will round off.
5. Use a Power Supply to raise the voltage
to just below 100V or as high as your supply supports (stay below 105V), and verify using a DMM. At this voltage level, the measurement resolution is 3mV.
6. The difference between the DMM
measurement and what the OLED shows should be less than +/-0.5%. If it is more,
you can activate the optional calibration below.
Obtain the two-point calibration factors for the voltage display
1. Note the voltage of the low reference value (2.500V?)
2. Note the voltage you used for the high voltage level you applied to the input.
3. Note the voltage shown on the OLED when you applied the high voltage check point.
4. You need to enter all three values to activate the 2-point calibration shown below.
2. When you have entered these values in the Calibration Mode below, come back here to verify the values again.
Calibrate the current circuit
1. Set the Power Supply for a voltage of
10.0V and a maximum current of 1.5A.
2. Connect a DMM to the DAC output test point (TP5 called DAC) and a GND test point (TP2) nearby on
the main PCB and use the rotary encoder to get a reading closest to 400mV on the DMM. The Set current on the OLED display will be close to 1000mA +/-10mA. Turn the load on and let the system
warm up for a few minutes and readjust the rotary encoder if needed.
A reading of 400mV at the DAC output should result in a 1000mA output current due to the multiplication factor of 2.5 by the current control circuit. The trimmer is used to get that precise, to eliminate resistor tolerances in the input attenuation circuit.
3. Adjust RV2 (Current Gain Trim) on the main PCB to get a current of 1.000A on
the power supply or measure the current with a DMM. Note that the current on
the OLED display itself may not be accurate yet, it still needs to be calibrated in a next step.
Software Calibration & Verification
IMPORTANT
Enter the Calibration Mode (see the procedure below) and verify that the relevant calibration factors are all set to 1.00, unless you do a partial calibration, in which case only the relevant settings must be set to 1.00.
- Run SET RESET to clean-out all calibration factors.
- When you only want to do a certain procedure again, only reset those cal factors. As an example, if you're only going to redo the calibration for the two-point current, use the SET CURRL 100 100 and SET CURRH 3000 3000 to reset only those two cal factors to 1.00.
Verify this with CAL SHOW, and do not forget to use CAL SAVE before you run CAL EXIT.
Verify the sense switch operation
1. Set the Power Supply to 30V and a current of at least 1.5A. Connect sense leads from the DL sense inputs to the Power Supply. Directly connect them at the Power Supply connections. Make sure the load is OFF.
2. Switch the sense switch to on and verify that the DUT voltage is the same in both on and off settings.
3. Turn the DL input ON with a short press of the decoder button, and check that there is no current flowing yet. Adjust the rotary encoder of the DL load such there is at least 1A flowing as a load.
4. Alternate the sense switch in both positions to show the effect of the external sense input that will compensate the voltage reading for higher currents flowing through the main leads, that will cause a loss and therefore a voltage drop. If you switch to higher currents, the effect will even be larger.
Verify the DAC-ADC and the Power Section
accuracy
1. Measure the voltage at the DUT_I test
point on the main PCB -- it should be between 396 and 404mV which represents an accuracy of +/- 1%.
2. Store the measured value in mV in DUTC in the calibration mode so you keep a record of the component and devices tolerance.
With the optimum tolerances, the value should be 400.00mV (it is currently not used however)
Obtain the two-point calibration factors for the current display
In this calibration step we are using the current value set by the encoder to match the measured current on the OLED display. This method allows for a consistent user interface. The actual current load as shown on the DMM or power supply may be slightly off, although still within 1%.
Because we use a two point calibration to do the extrapolation between the two to get better precision, you need to make two measurements and record four values.
1. Verify that the calibration factors for the current are set to 1.0 before you start this procedure.
Make sure to use the sense leads and turn the sense on. Connect the 4 leads to a power supply, set the voltage to 10V and the current limit to just over 3 or 6A. Activate the DL with a current of 1A and let it warm-up for a few minutes.
2. In the CC mode, with the load ON, set
the current with the encoder to 100mA. Verify that the Power Supply shows a current of approx. 100mA +/- 8mA, or use a DMM in current mode to measure the current. Note the set current value (100mA) as low_set_mA, because you need that later.
3. Note the current value on the OLED
display and record that value as low_oled_mA, because you need that later.
4. Now set the highest available current you have available with the rotary encoder, and note that value as hi_set_mA, you will need that later.
5. Read the OLED current on the display and note that as high_oled_mA. You will need that later.
6. You can enter these four values into the system using the Cal procedure below.
7. When you have done that, you can verify that the OLED current measurement matches the Set current value and that it is still virtually the same as the Power Supply or DMM current at different load values.
Verification:
Here is the result that I measured using a calibration with the minimum of 100mA and the maximum of 6A. (my Siglent SPD3303X-E with the higher resolution display hack, in the parallel mode)
In the horizontal axis is the Set mA by the rotary encoder, OLED is the deviation in percent's of what's shown on the screen, and PS is what my Power Supply is showing as the actual current. (The PS is not calibrated)Recommendation:
Although the precision is quite good, it makes sense to calibrate the DL with a typical maximum current you will be using regularly. In my case that is well below 3A, so I'll calibrate against a maximum of 3A to get even better accuracy. If your current demands are not so much below 250mA, you could also calibrate with a minimum current of 250mA, to get rid of the hump at 500mA, which is the sum of the DAC and ADC INL.
Below is the result of calibrating with a minimum of 250mA and a maximum of 3000mA:
Obtain the CV mode tripping voltage
Because this mode relies on correct voltage levels, it is best to enter the above values in the calibration mode, verify them, and then come back here.
1. Use a Power Supply and apply a voltage
of 50.00V, which is half of the maximum input, or use as high a voltage as you have available and set the maximum supply current to 100-200mA. (When the CV mode is
tripping, a Lab Power Supply will go into the CC mode, and will apply the full
current to keep the voltage the same. We want the current to be low, to keep
the temperature low during this calibration)
2. Activate the CV mode, the Set voltage
will be automatically set to 2% higher or 51.00V. Switch the DL to ON. There
should be no current flowing, if there is, raise the set voltage slowly with the rotary encoder until there is
no current flowing.
3. Slowly dial down with the rotary encoder to make the Set voltage match the measured voltage and set it one click below and wait a little. For the first time after activating the CV mode, the regulation switches from current regulation to voltage regulation, and with this small voltage difference, it takes a little while for the Opamps to reach the regulation point. Wait for a minute. After that, there are two possibilities:
- Current could already start to flow. If so, the Tripping voltage is too high. Dial the Set voltage further up until it stops the current flow and from there, start to slowly dial down again and make a note of the Set voltage at the point current starts to flow. Now go back up in voltage a little until the current stops to flow.
- Calculate the cal factor by dividing 50.00 by the Set voltage and note that 0.9xxx value.
- If current is not flowing yet, dial the Set voltage slowly further down until the current starts to flow. Go back up until the current stops, and from there, dial it down again until current starts to flow. Stop and note the Set voltage. Now go back up in voltage a little until the current stops to flow.
- Calculate the cal factor by dividing the Set voltage by 50.00 and note that 1.xxxx value.
4. You need to enter that value into the system with the calibration procedure further down and come back here again.
5. After you have entered the value into the system, verify that the tripping voltage when current will start to flow is now very close to the actual voltage measurement shown on the display. (it is unlikely you
will get it exactly the same, but it should be really close)
6. Try the CV mode now with a Power Supply
setting of 2.00V and verify that the tripping point is still very close. To get the automatic Set voltage based on the measured input voltage, you need to cycle through the modes by long-pressing the rotary encoder, until you are back in the CV mode, in which case the Set voltage is automatically set to 2V + 2% or 2.04V. If not, you have to manually dial the Set voltage down to 2.04V. Check that the trigger points are just below and above the 2.0V level. The calibration will not be the same as for the 50V, it's linear but will be different. If needed, you can tweak the calibration factor.
Testing the CV Mode
CV mode with a regulated (CV/CC) power supply
Note that with a Lab Power Supply as a DUT, the CV mode is a bit more difficult to use due to the rapid switch of the power supply from CV to CC at the DL CV tripping point. You need to carefully adjust the encoder click by click to get to and stay in an actively controlled load with the supply not yet turning the voltage fully off. If that happends, the DL will automatically switch the load off as a safety measure. Start with a small maximum current of the power supply, and increase the current when you're more comfortable.
CV mode with an unregulated supply
Another way to test the CV mode and get more familiar with it, you can also use an (unregulated) power supply that does not have current fold-back or current limiting/regulation. A transformer with a (bridge) rectifier and an electrolyte filter capacitor will be much more forgiving to show the CV mode regulation in operation. This kind of DUT will clearly show the sagging DUT voltage as a result of the load that is a result of lowering the Set voltage.
CV mode with a battery
Basically any battery or cell will provide another DUT to get familiar with the CV operation. Be aware that some cells can deliver a lot of current. This is one of the reasons that in the firmware, the current limit in the CV mode is fixed to a maximum of 4A, hopefully preventing injuries or fire-works. Because the battery or cell will do its utmost to keep the voltage stable, you can clearly see the effect of the current changes due to the lowering of the Set voltage.
Enter the calibration values in the ESP32 NVM
You can start the calibration procedure after you uploaded the v7.1.8 or higher FW to the Dynamic Load.
Use a serial monitor like PuTTY, Tera Term, or the Arduino IDE Serial Monitor and connect the serial cable to the USB-C slot in the DL front panel. Set the correct USB port, the baud rate to 9600 and flow control to none to keep RTS/DTR inactive.
WARNING: Do NOT use the VSC Serial Monitor. While that worked before, after a code change to the PlatformIO 6.x, it no longer works in this application. There is no fix for this terminals, don't use it.
There are two ways to enter the calibration mode.
1. You have the enclosure open and have access to the EN button on the ESP32 board.
- You enter the calibration mode by pressing the rotary encoder button and then restart the DL by momentarily pressing the EN button on the ESP32 board.
2. You are performing the calibration with the unit closed.
- Pull the USB cable first (to remove power from the ESP32 module), and then power cycle the DL with the Power switch on the front panel (give it a few seconds in the off position for the power to bleed) while pressing the rotary encoder button.
The boot process will show the splash screen on the OLED display with the FW version number and then shows the Calibration welcome screen. If you didn't get there, try the power cycle again and press the rotary button until you get into the Calibration welcome screen.
Connect the USB cable and startup a serial monitor.
In the serial monitor, enter CAL or cal to enter the calibration menu. (Sometimes the filled serial buffer will send a bunch of characters or symbols to the monitor, just enter cal or CAL to stop it.)
You will now see the calibration commands in the serial monitor and on the OLED screen. In that menu you can enter the calibration values that you collected and noted with the procedures above. Save the values by entering CAL SAVE and then CAL EXIT.
When you have typed CAL EXIT, disconnect the USB serial cable to prevent the EN-ESP lock-up!
Now press the rotary button to reboot the system. It will from now on use the entered calibration values. More information is in the Calibration Guide on the Github repo.
Here are the available Cal Menu commands:
CAL SHOW - Display current values
CAL CV <value> - Set cvCalFactor
CAL VH <actual_V> <oled_V> - Set high-point voltage cal
CAL VREF <voltage> - Set low anchor voltage (default 2.5V)
CAL DUTC <value> - Set DAC_ADC_TOLERANCE
CAL CURRL <set_mA> <oled_mA> - Calibrate low current point in mA
CAL CURRH <set_mA> <oled_mA> - Calibrate high current point in mA
CAL SAVE - Save to persistent storage
CAL RESET - Reset to defaults
CAL EXIT - Exit calibration mode
IMPORTANT
When you start to collect the calibration factors in the procedure above, make sure you first set all relevant factors to 1.00 before beginning, or when you start from scratch, use CAL RESET. Verify the settings with CAL SHOW, and always use CAL SAVE.